
Research Assistant
Phone:
+49 711 685 66193
The use-oriented questions are dealt with in close cooperation with the respective industrial partner. In a first step, this requires to anaylze the system at hand and develop an appropriate representative model capturing the system's behavior. The characterizing parameters of the system need to be identified und subsequently, the models are validated by comparison of real measurements and simulation data. Based on these results methods of control engineering are applied in order to achieve automatization or enhance the efficiency, the precision, the safety or the comfort. Particular emphasis is placed on researching methods for active vibration compensation. Such vibrations occur in large structures due to progressing lightweight construction and due to an increasing demand for precision.
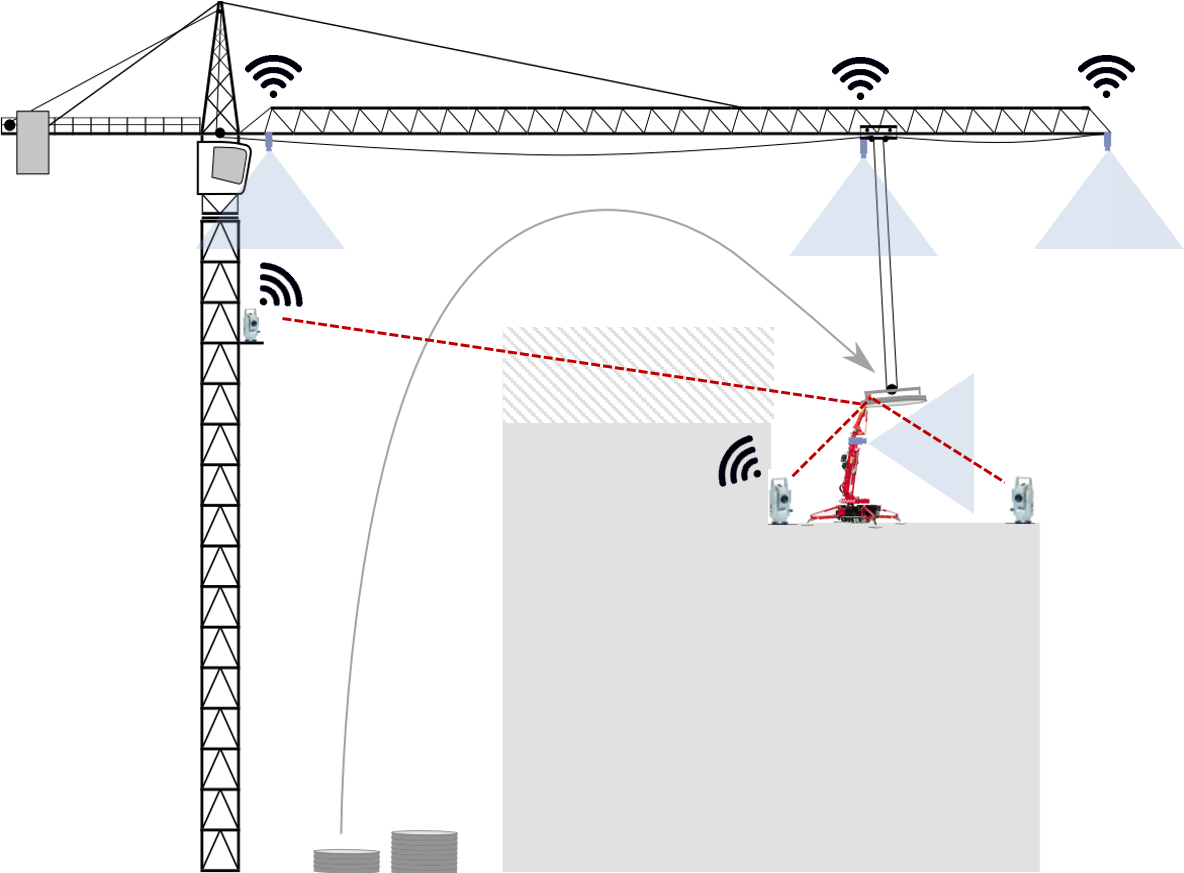
In this context, different theories of robotics, such as modeling the system, trajectory generation and tracking, model-based feedforward control as well as decentralized control, are put into practice within a broad field of industrial applications. Among others the topic of reference trajectory tracking of a tool (e.g. crane hook, rescue platform) is researched. Moreover, damping of structural vibrations or oscillating loads are of particular interest. Here, nonlinearities of the mechanical systems, the dynamics and nonlinearities of hydraulic actuators (popular in large scale robotics), structural flexibilities, the computational cost, and possibilities for porting on real-time capable hardware are considered. In cooperation with our project partners we develop control concepts from the theoretical idea towards product introduction.








We are always looking for students, who want to contribute to one of our research projects through a bachelor's or master's thesis. The assigned subjects typically include but are not limited to:
If you are interested in one of our projects and would like to get more information, or if you'd like to inquire about additional topics, please don't hesitate to contact us.











