
Wissenschaftlicher Mitarbeiter
Telefon:
+49 711 685 66193
Die Analyse der vorliegenden Systeme und die Entwicklung systemdynamischer Modelle ist Grundbestandteil aller Projekte. Die beschreibenden Systemparameter gilt es zu identifizieren und anschließend die Modelle anhand von Vergleichen zwischen Messdaten und Simulationsergebnissen zu validieren. Darauf aufbauend werden Methoden der Regelungstechnik angewendet, um beispielsweise Automatisierungsfunktionen zu realisieren oder die Effizienz, Präzision, Sicherheit sowie den Komfort zu verbessern. Besonderer Forschungsfokus liegt auf der aktiven Kompensation von Systemschwingungen, die bei großen Strukturen aufgrund von fortschreitendem Leichtbau und steigender Forderung nach Präzision immer anwendungsrelevanter werden.
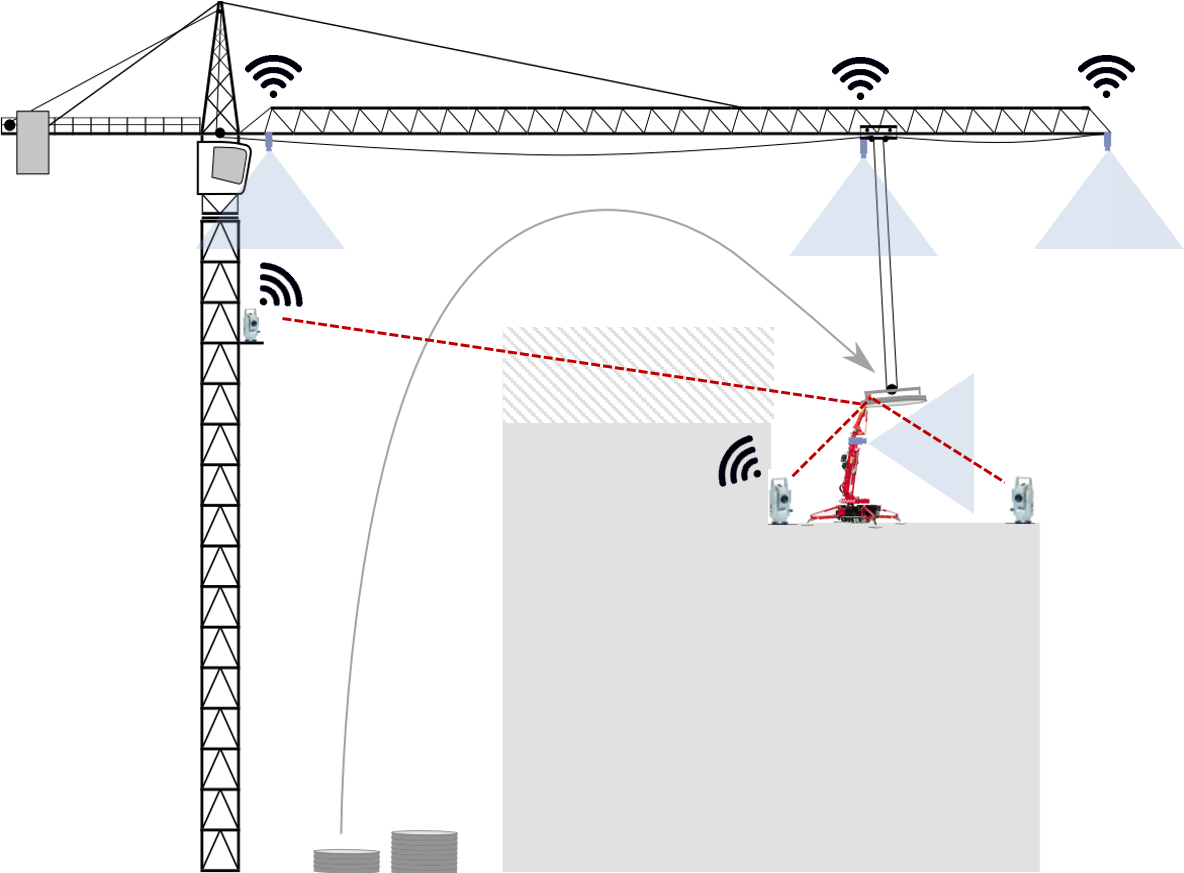
In diesem Zusammenhang werden verschiedene Theorien der Robotik, wie Systemmodellierung, Trajektoriengenerierung und -folge, modelbasierte Vorsteuerung sowie dezentralisierte Regelung an einem breiten Feld industrieller Anwendungen umgesetzt. Ein großes Themengebiet ist u.a. das geregelte Verfahren eines Werkzeugs (z.B. Kranhaken, Rettungskorb) auf einer vorgegebenen Bahn. Andere Themengebiete beinhalten die Dämpfung von Strukturschwingungen und das Unterdrücken von Pendelbewegungen einer Last am Haken. Hierbei werden Nichtlinearitäten des mechanischen Systems, die Dynamik und Nichtlinearität des hydraulischen Antriebs (weit verbreitet in der Großraumrobotik), strukturelle Flexibilitäten sowie der Berechnungsaufwand und Möglichkeit der Portierung auf echtzeitfähige Hardware berücksichtigt. In Kooperation mit unseren Projektpartnern entwickeln wir Regelungskonzepte von der theoretischen Idee bis hin zur Produkteinführung.









Wir suchen ständig motivierte Studierende, die sich im Rahmen einer Studien-, Diplom-, Bachelor- oder Masterarbeit an einem unserer Projekte beteiligen wollen. Die Aufgabenstellungen liegen dabei typischerweise in den folgenden Bereichen:
Interessierte Studierende wenden sich direkt an die Mitglieder der Großraumrobotikgruppe, um sich persönlich über mögliche Themen zu informieren.











