Forschungsmission Exzellenzcluster IntCDC
Die Vision des Exzellenzclusters Integrative Computational Design and Construction for Architecture (IntCDC) ist die Nutzung des vollen Potenzials der digitalen Technologien, um Entwurf, Fertigung und Konstruktion auf der Grundlage von Integration und Interdisziplinarität neu zu überdenken. Ziel ist es, im Bausektor wegweisende Innovationen zu ermöglichen, wie sie nur durch hochintegrative Grundlagenforschung in einem interdisziplinären, groß angelegten Forschungsvorhaben möglich sind.
Projektbeschreibung RP 8
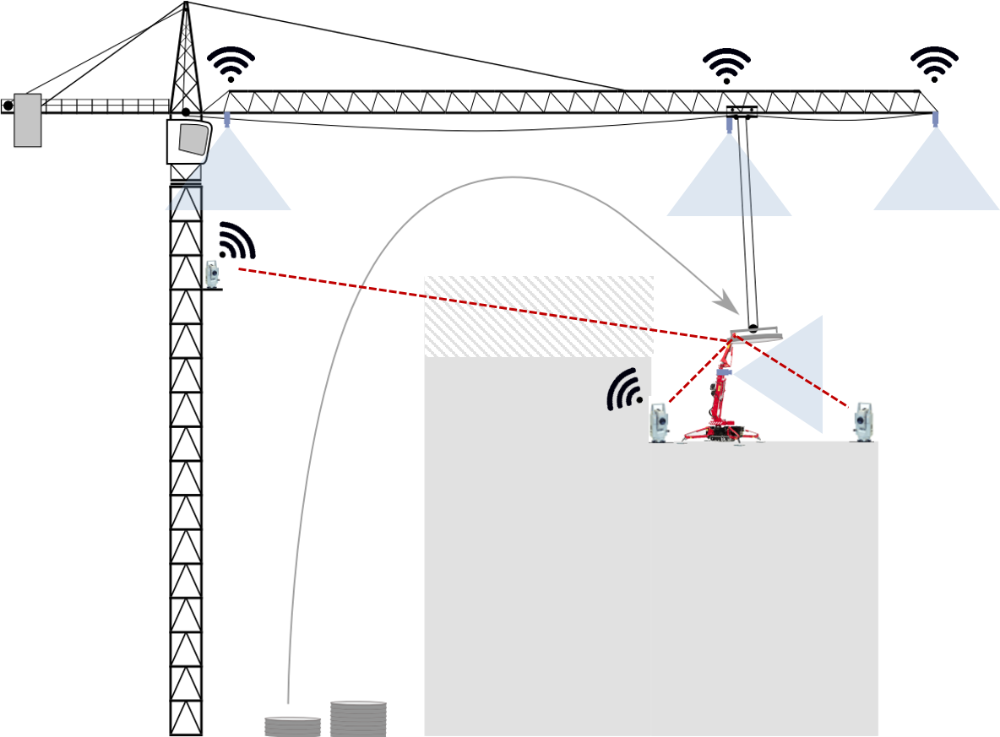
Das Forschungsprojekt 8 des Exzellenzclusters IntCDC befasst sich mit der Entwicklung einer cyberphysikalischen Konstruktionsplattform für die automatisierte Handhabung von Schwerlasten und die Montage von vorgefertigten Elementen für mehrgeschossige Gebäude. Ein automatisierter Turmdrehkran realisiert Aufnahme- und Transportprozesse als großraumrobotisches System. Zur Überwachung aller automatisierten Prozesse und des gesamten Baufortschritts werden Bildverarbeitungsmethoden oder Laserscanning eingesetzt, was zu einem Baustellenüberwachungskonzept führt. Mit dem Ziel der Vollautomatisierung werden Bahnen und Trajektorien für den Materialtransport und die Montage auf der Grundlage eines von den bildgebenden Sensoren abgeleiteten Umgebungsmodells geplant.
Zusätzlich zielt RP 8 auf die automatische Ausführung der koordinierten Bewegungen des Turmdrehkrans und des von RP 16 abgedeckten Spinnenkrans ab, um vorgefertigte Elemente nahtlos zu platzieren. Dies wird durch die Entwicklung von hybriden Steuerungsstrategien erreicht.
Um unterschiedlich geformte Elemente handhaben zu können, ist ein zentrales Ziel des RP 8 die Entwicklung eines hakenmontierten Aktivgreifers für Transport- und Montageaufgaben des Turmkrans. Der Greifer wird mit elektrisch angetriebenen Linearachsen ausgestattet, die zwei neue Rotationsfreiheitsgrade zur Ausrichtung der Elemente in eine vordefinierte Ausrichtung für die Montage einführen.
Bearbeiter

Mark Burkhardt
M.Sc.Wissenschaftlicher Mitarbeiter