Research mission Cluster of Excellence IntCDC
The vision of the Cluster of Excellence Integrative Computational Design and Construction for Architecture (IntCDC) is to harness the full potential of digital technologies in order to rethink design, fabrication and construction based on integration and interdisciplinarity, with the goal of enabling game-changing innovation in the building sector as it can only occur through highly integrative fundamental research in an interdisciplinary, large-scale research undertaking.
Project description RP 8
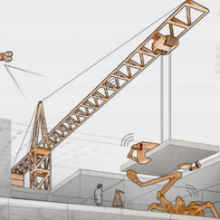
Research Project 8 of the Cluster of Excellence IntCDC addresses the development of a cyber-physical construction platform for automated and rope guided handling of heavy loads and on-site assembly of prefabricated elements for multi-storey buildings. An automated tower crane realizes pick up and transportation processes as a large workspace serving handling system. Imaging methods or laser scanning will be applied to monitor all automated processes and the overall construction progress resulting in a construction site monitoring concept. Aiming at full automation, we will plan paths and trajectories for material transportation and assembly based on an environmental model derived from these sensors.
Additionally, RP 8 aims at the automatic execution of coordinated motions of the tower crane and the spider crane covered by RP16 in order to seamlessly place prefabricated elements. This is achieved through the development of hybrid control strategies.
In order to handle different shaped elements, a central aim of RP 8 is to develop a hook-mounted active gripper for transportation and assembly tasks of the tower crane. The gripper will be equipped with electrically actuated linear axes that introduce two new rotational degrees of freedom for aligning the elements to a predefined orientation for assembly.
