
Automatisierung in der Bauindustrie gewinnt mit fortschrittlicher Sensortechnik und verbesserter Rechenleistung ständig an Zuwachs und Realisierbarkeit. Die Entwicklung von Assistenzsystemen, welche die hydraulischen Aktuatoren der eingesetzten Maschinen regeln, ermöglicht die autonome Ausführung von sich wiederholenden Aufgaben.
Der Teleskoplader, oder Telelader, ist ein hydraulisch angetriebenes Baufahrzeug mit einem ausfahrbaren Teleskoparm. Mit der Hubbewegung des Arms sowie der Neigung seines Schaufel- oder Gabelwerkzeugs ergeben sich drei Freiheitsgrade für die Arbeitsfunktionalität, die durch Hydraulikzylinder aktuiert wird. Der Fahrantrieb der mobilen Baumaschine erfolgt über einen hydromechanischen Antriebsstrang. Hydraulikpumpen werden von einem Motor angetrieben und befördern Fluid in die hydraulischen Sektionen des Teleskopladers, die durch Druckänderungen die gewünschte Bewegung hervorrufen.
Ziel des Forschungsprojekts ist eine Geschwindigkeitsregelung der Hydraulikzylinder von Teleskopladern als Grundlage für Assistenzsysteme und Automatisierungsfunktionen, welche die Produktivität und Sicherheit erhöhen. Somit wird zunächst ein detailliertes dynamisches Modell hergeleitet, welches den Entwurf eines modellbasierten Zustandsreglers ermöglicht. Die Validierung des resultierenden digitalen Zwillings und die Analyse der entworfenen Reglerkonzepte sowie der entwickelten Funktionen werden anhand von Messungen mit Teleskopladern des Typs T55-7s und T46-7s durchgeführt.
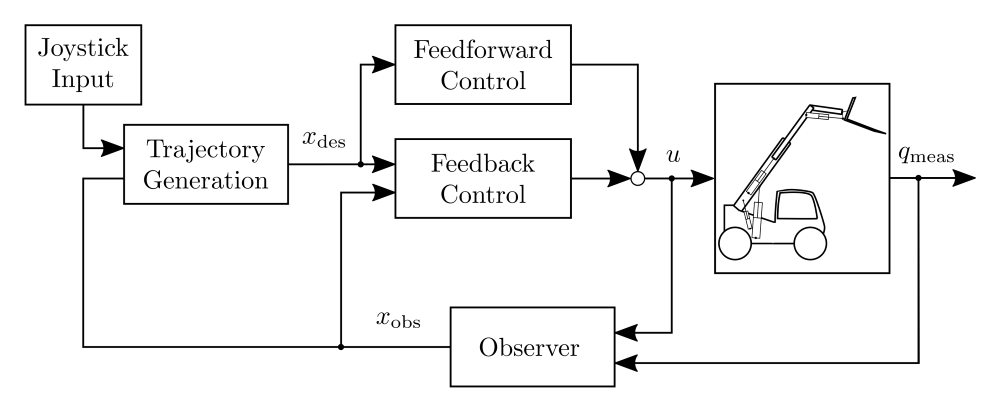
Ein effektiver und robuster Geschwindigkeitsregler für die hydraulischen Aktuatoren kombiniert die Anwendung von Methoden, so dass die Zylindergeschwindigkeiten vorgegebenen Trajektorien folgen. Die Invertierung des Modells ergibt eine effiziente Vorsteuerung, während lineare Regelungsalgorithmen für die Zustandsrückführung, wie der LQR, eine Linearisierung der nichtlinearen Systemdynamik erfordern. Geschätzte Systemzustände werden sowohl in der Rückführungskomponente des Reglers als auch bei der Erzeugung optimaler Trajektorien berücksichtigt.
Die Implementierung einer Funktion wird durch eine entsprechende Trajektoriengenerierung umgesetzt, die Zeitverläufe unter Berücksichtigung der Systemgrenzen berechnet und an die Regelung übergibt. So kann beispielsweise ein Verfahren des Endeffektors zu einer vorgegebenen Endposition oder eine planare Bewegung realisiert werden. Weitere Funktionen sind die Limitierung des Lastmoments, welche das Umkippen der Maschine verhindert, und eine Playback-Funktionalität, die eingelernte Bewegungen wiederholt.
- Liebherr-Werk Telfs GmbH
Projektpartner für das Forschungsprojekt - Teleskoplader von Liebherr
Betrachtetes System im Forschungsprojekt
Ansprechpartner

Christos Parlapanis
M.Sc.Wissenschaftlicher Mitarbeiter