
Description
Since the load sway motions of tower cranes are almost undamped, it is a demanding task to steer the loads safely and stop them at the target position without residual sway. Anti-sway control systems assist the operator to actively damp the load oscillations which can improve safety and handling performance.
But since tower cranes are usually built as large lightweight constructions, they exhibit a limited stiffness that leads to notable structural oscillations in every day use. The structural dynamics represent a challenge for feedback control design, since neglecting them can lead to instability so they need to be taken into account explicitly. This is a main reason why even modern tower cranes are usually not yet equipped with an active sway damping system.
The aim of this research project is an active sway damping control for tower cranes that takes the structural dynamics into account.
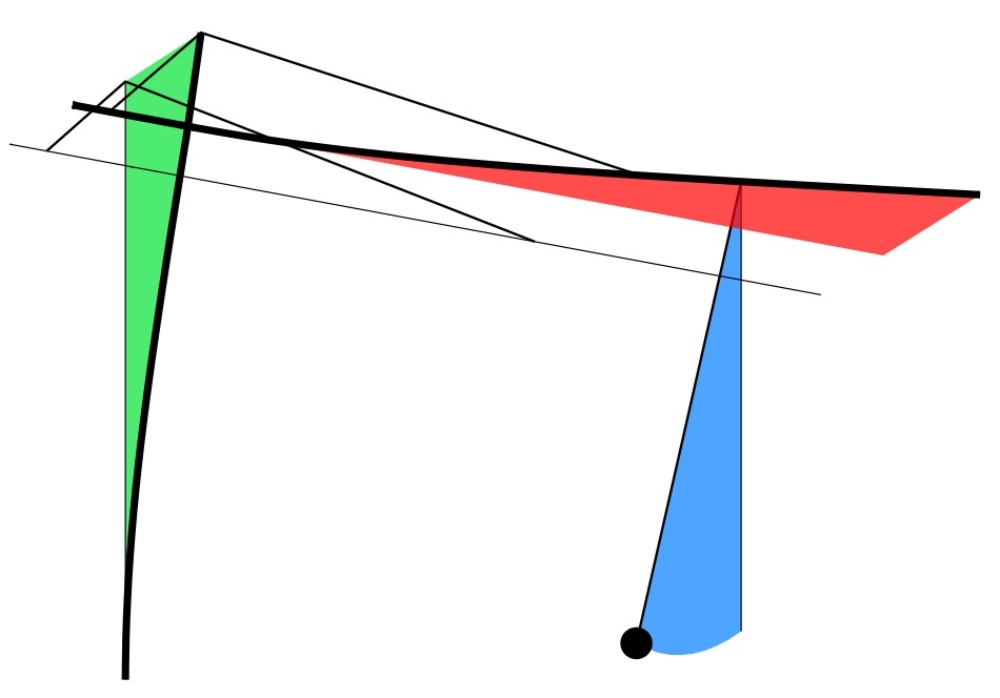
Therefore a detailed control oriented dynamic model of tower cranes is derived as a flexible multi body system that takes the dynamics of steel structure, system drives, flexible rope and payload into account. Based on this model, a state feedback control is designed. An observer is used to estimate the sway angles and structural deformations. In order to reach target positions or velocities, a two-degree-of-freedom structure is used that combines the feedback with a flatnessbased feedforward control. Based on the joystick signals, reference trajectories for crane and load motions are planned such that the target position can be reached without residual sway.