
Research Assistant
Phone:
+49 711 685 66622
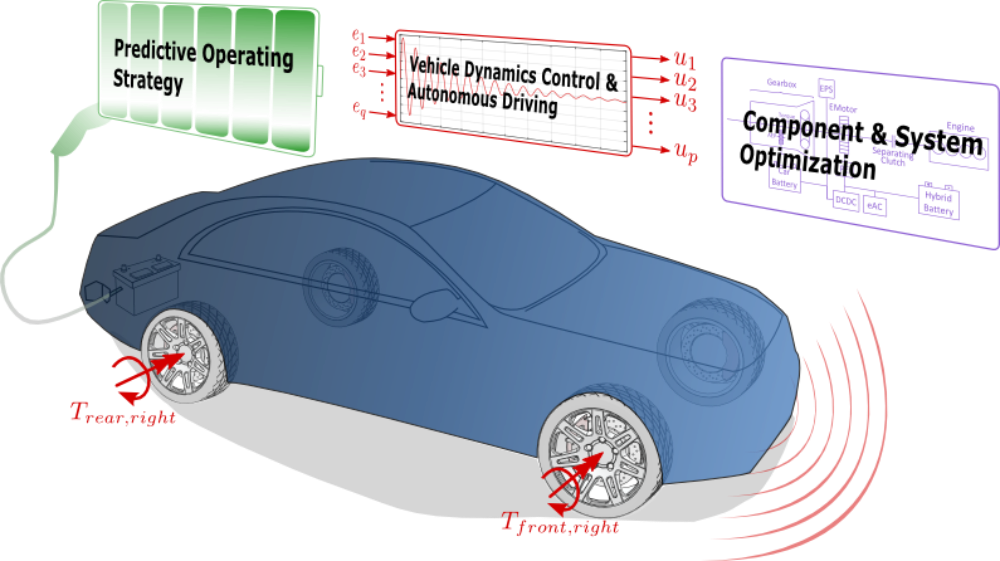
The ISYS Automotive Research Group is engaged in the development of electric, mechanical, thermal and fluidic systems within the automotive sector.
Our research is focused on the application of novel methods in modeling and system analysis as well as linear/nonlinear control and optimization. Research projects are conducted in close cooperation with domestic and international industry, such as the Audi AG, Mercedes-Benz AG and the Mercedes-AMG GmbH.


We are always looking for students who want to contribute to one of our research projects through a bachelor's or master's thesis. The assigned subjects typically include but are not limited to:
Current open positions for thesis and assistant jobs can be found here. If there are no open positions at the moment, you can still contact one of our group members directly for more information or if you would like to inquire about additional topics .




