Go directly to
Description
Clutch changes in stepped automatic gearboxes are crucial factor when it comes to comfort and sportiness of a vehicle. Comfort can be increased by reducing the jerk or by ensuring a smooth transition between acceleration levels during clutch changes. The subjective sportiness can be simulated by short shift times and shaped acceleration trajectories.
A clutch change is a dynamic process and poses a major challenge in modern research. Current control strategies are mostly based on static mappings depending on the various driving conditions. Identifying the control parameters for each driving condition is very time-consuming. Additionally, each clutch change is individually adapted and correction functions are used to compensate disturbances. Quasi-static adaption algorithms and robust controllers are implemented to accommodate for uncertainties but they entail drawbacks in the dynamics.
Automatic Gearbox 9G-TRONIC
Photo: (c) Daimler AG
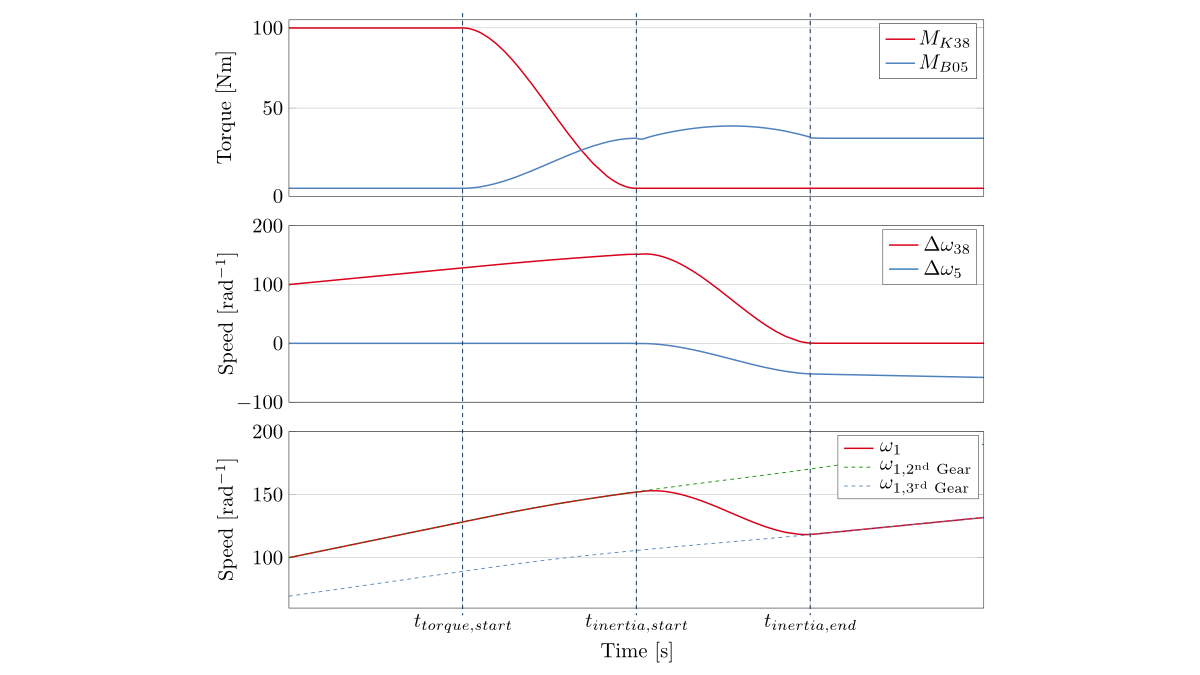
Speeds and torques during a 2-3 power-up shift
Aim of the project
In this project the Institute for System Dynamics and Daimler AG cooperate to design a model-based adaptive control strategy to improve the shift quality. In a first step, models of the hydaulical, mechanical and eletrical elements are developed and validated. The new conrol concepts are then designed and tested using those models. A software environment (SiL) as well as an experimental vehicle are used for testing. Moreover, in a second part of the project, it is desired to use the advantages of the additional input given by the electric motor to further improve shift quality and/or develop new adaption algorithms.