Allgemeine Informationen
Am ISYS werden mehrere Projektierungspraktika für Studierende der Technischen Kybernetik angeboten. Eine Übersicht der angebotenen Versuche finden Sie weiter unten. Zum Bestehen des Projektierungspraktikums muss ein Versuch erfolgreich absolviert werden. Für alle Versuche gilt:
- Aufgabe
-
In Gruppenarbeit ist eine Aufgabe möglichst selbstständig zu bearbeiten.
- Gruppengröße
-
2 bis 3 bzw. 4 Personen
- Datum
-
Während der vorlesungsfreien Zeit im Winter- oder Sommersemester. Die genaue Terminabsprache erfolgt über den ILIAS-Kurs.
- Dauer
-
1 Woche (ca. 40h) Präsenzzeit, bis zu 40h Vor- und Nachbereitung
- Abschlussbericht
-
Ein Bericht (ca. 4-15 Seiten) über das Praktikum ist zu verfassen.
- Anmeldung
-
Die Anmeldung zu dem gewünschten Praktikums-Versuch erfolgt über den ILIAS Kurs. Melden Sie sich hierzu bitte in C@MPUS bei der Gruppe "Projektierungspraktikum (Gruppe ISYS)" an, um dem Ilias-Kurs "Projektierungspraktikum (Gruppe ISYS)" beizutreten. Je Praktikums-Versuch gibt es pro Semester zwei Gruppenplätze.
Die Anmeldung für das SS25 startet am 14.04.2025 um 10:00 Uhr und endet am 03.06.2025. Die Praktikas werden nach dem First Come First Served Prinzip vergeben.
- ILIAS-Kurs
- C@MPUS
Versuche
Beschreibung
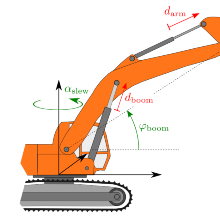
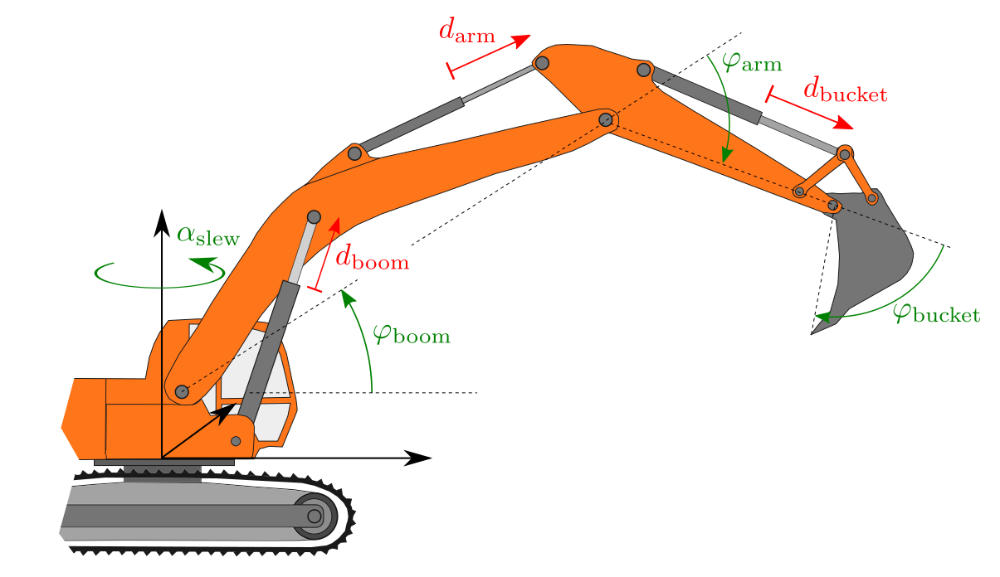
Baumaschinen sind komplexe Systeme die einer stetigen Entwicklung unterworfen sind. Um die Leistungsfähigkeit dieser Maschinen zu steigern, werden zunehmend Fahrerassistenzsysteme entwickelt. Sie unterstützen die Fahrerin oder den Fahrer bei schwierigen Manövern, steigern die Wirtschaftlichkeit und vermeiden Unfälle. Eine Tool-Center-Point Steuerung ermöglicht die intuitive Bedienung der Arbeitsmaschine, um die an den Baggerfahrer gestellte Aufgabe schnell und präzise umzusetzen.
Aufgaben
- Herleitung der kinematischen Zusammenhänge des Auslegers
- Einarbeitung und Implementierung eines TCP-Steuerungsalgorithmus
- Regelungsentwurf an einer hydraulisch angetriebenen Achse
- Praktische Erprobung am Versuchsträger
Gruppengröße: 2-4 Personen
Ansprechpartner: Sören Hain
Beschreibung
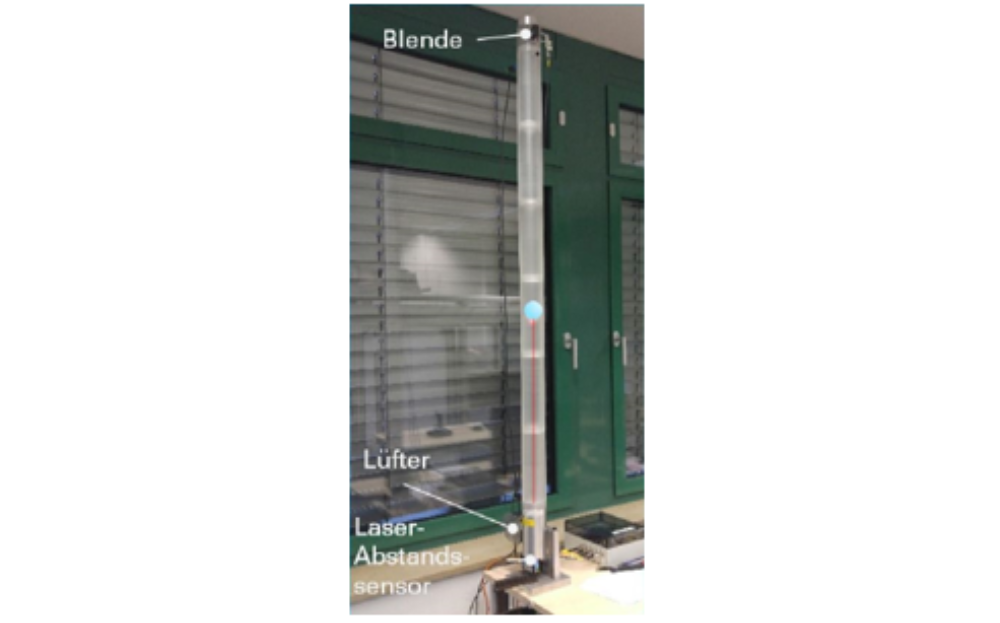
Der Schwebender Ball Versuchsaufbau besteht aus einer vertikalen Röhre, welche sich aus drei Segmenten gleicher Höhe zusammensetzt. Der Durchmesser des ersten Segments weitet sich nach oben hin, im mittleren Segment ist der Durchmesser konstant, während er sich im oberen Segment wieder nach oben hin verringert. In der Röhre befindet sich ein Tischtennisball. Am Boden der Röhre ist ein Lüfter angebracht mit welchem sich ein Luftstrom nach oben erzeugen lässt. Am oberen Ende der Röhre ist eine Blende angebracht. Diese lässt sich zwischen 0° (geschlossen) und 90° (offen) stellen, womit sich also die durchströmte Fläche einstellen lässt.
Aufgaben
- Erstellen einer Software zum Ansteuern des Versuchsaufbaus
- Entwurf und Implementierung eines Regelungskonzepts
- Praktische Erprobung am Versuchsaufbau
Gruppengröße: 2-3 Personen
Ansprechpartner: Charlotte Stein, Alice Hierholz
Beschreibung
Das Inverse Pendel stellt ein klassisches Beispiel der Regelungstechnik dar. Eine nichtlineare Dynamik mit instabiler Ruhelage und ein relativ einfachen Versuchsaufbau machen es zum idealen Projekt für die Überprüfung und die Demonstration von Regelungsstrukturen. Die Dynamik findet Parallelen in balancierenden Systemen, wie zum Beispiel dem Segway, einer Rakete oder einem stehenden Menschen.
Aufgaben
- Herleitung eines dynamischen Modells der Regelstrecke
- Analyse und Anpassung des Modells an das reale System
- Entwurf und Implementierung eines Regelungskonzepts
- Praktische Erprobung am Versuchsaufbau
Gruppengröße: 2-4 Personen
Ansprechpartner: Josias Rühle, Philipp Wasserloos


Beschreibung
Das inverse Pendel ist ein weithin bekannter Versuchsaufbau im Bereich der Regelungstechnik. Im Praktikumsversuch „elastischer Balken“ wird das Pendel durch ein am unteren Ende fest eingespanntes, dünnes Blech ersetzt. Das Ziel ist es nun, den elastischen Balken zu verfahren, ohne seine Eigenschwingungen anzuregen. Dazu werden die Spannungen im Balken mittels DMS gemessen und über einen Randeingriff Steuer- und Regelungsstrategien umgesetzt.
Aufgaben
- Verteiltparametrische Modellierung des Balkens
- Regler- und Vorsteuerungsentwurf
- Praktische Umsetzung mit Matlab/dSpace
Gruppengröße: 2-3 Personen
Ansprechpartner: Daniel Briem, Frank Wolff
Der C-Kurs wird im Wintersemester 2024/25 nicht angeboten.
Weitergehende Informationen finden Sie auf der Seite zum C-Kurs.
Beschreibung
In vielen technischen Anwendungen ist es wichtig, die genaue Position und Lage eines im Raum beweglichen Körpers zu bestimmen. Beispiele hierfür sind Navigationslösungen in Luftfahrt und Automobilindustrie. Durch die Fusion der Sensoren für GPS, Erdmagnetfeld, Beschleunigung und Drehraten (Gyroskope) können die Genauigkeit verbessert und der Einfluss von Messfehlern verringert werden.
In diesem Versuch werden die Grundlagen der Navigation mittels GPS und Inertialmesseinheit (IMU) sowie die Funktionsweise von Kalman-Filtern erlernt. Die implementierten Fusions-Algorithmen werden simulativ getestet und dann mit realen Messdaten validiert. Zur Aufzeichnung der Messdaten kommt eine hochgenaue IMU zum Einsatz. Bei Interesse können auch Messdaten der eigenen Smartphones zur Fusion verwendet werden, die in der Regel alle erforderlichen Sensoren bereitstellen.
Aufgaben
- Implementierung von Fusions-Algorithmen (z.B. Kalman-Filter)
- Praktische Validierung mit realen Messdaten
Gruppengröße: 2-4 Personen
Ansprechpartner: Melanie Gschweng, Noëlle Houriez

Ansprechpartner für allgemeine Fragen

Andreas Gienger
Dr.-Ing.Gruppenleiter Baurobotik