
Externer Lehrbeauftragter
Die Optomechatronik-Gruppe des ISYS beschäftigt sich mit der Modellierung, Simulation, Regelung und Optimierung von Systemen an der Schnittstelle von Mechatronik und Optik. Dazu arbeiten wir mit verschiedenen universitären und außeruniversitären Partnern zusammen.
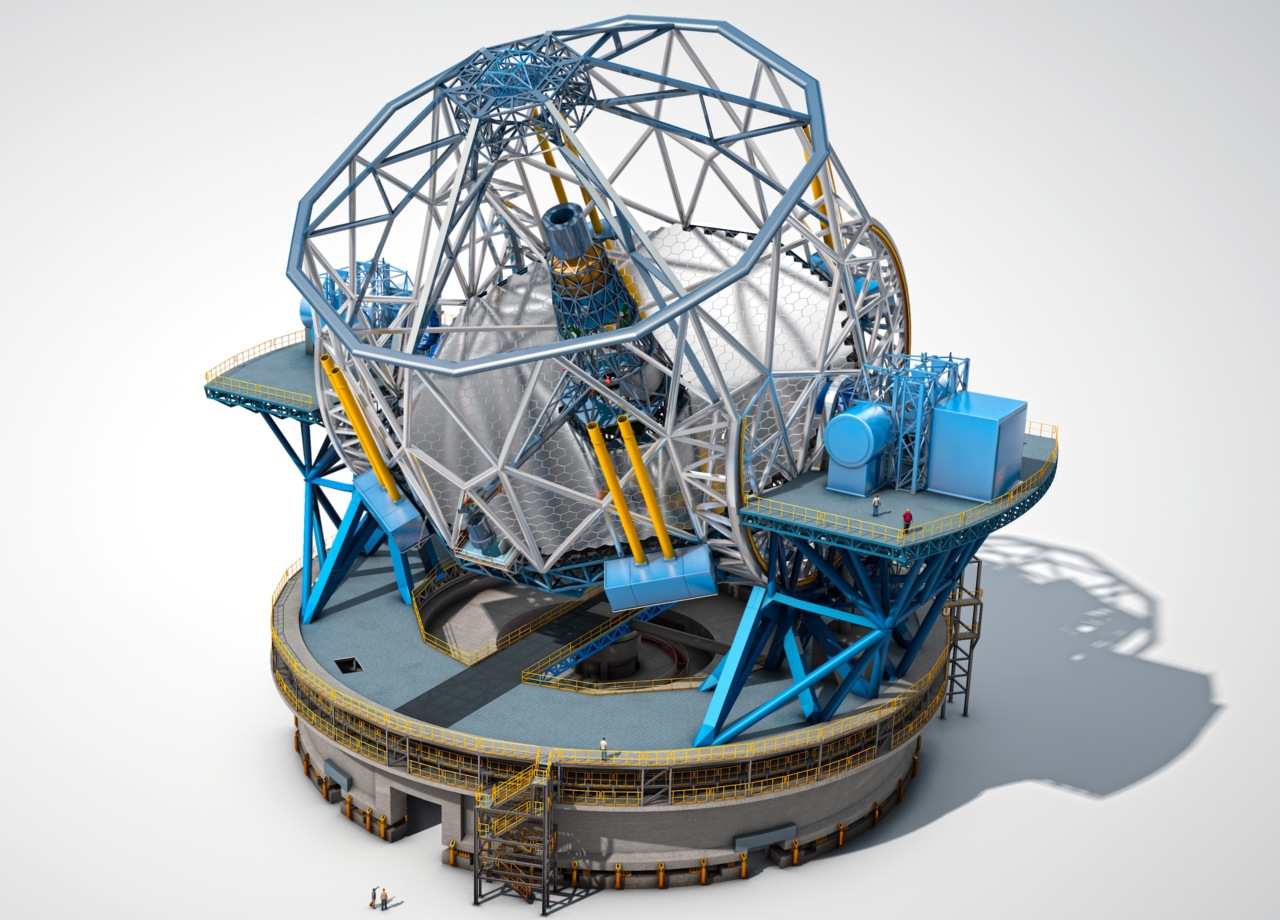
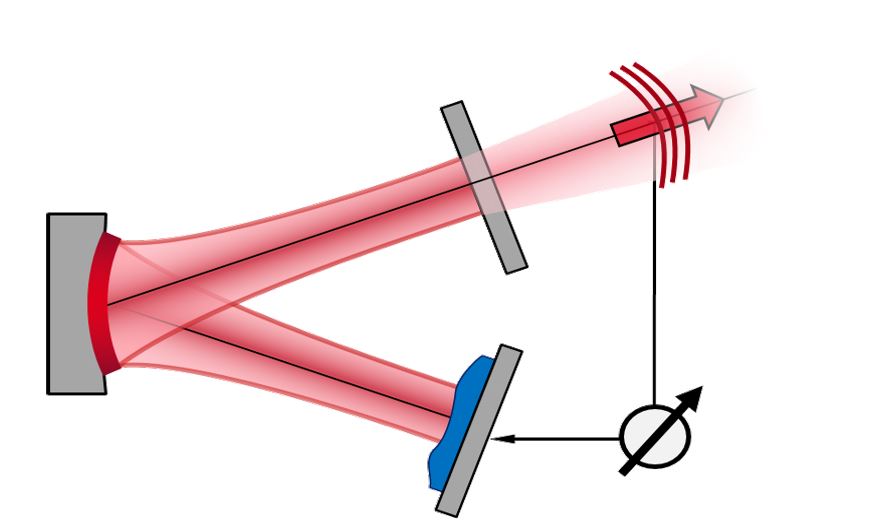
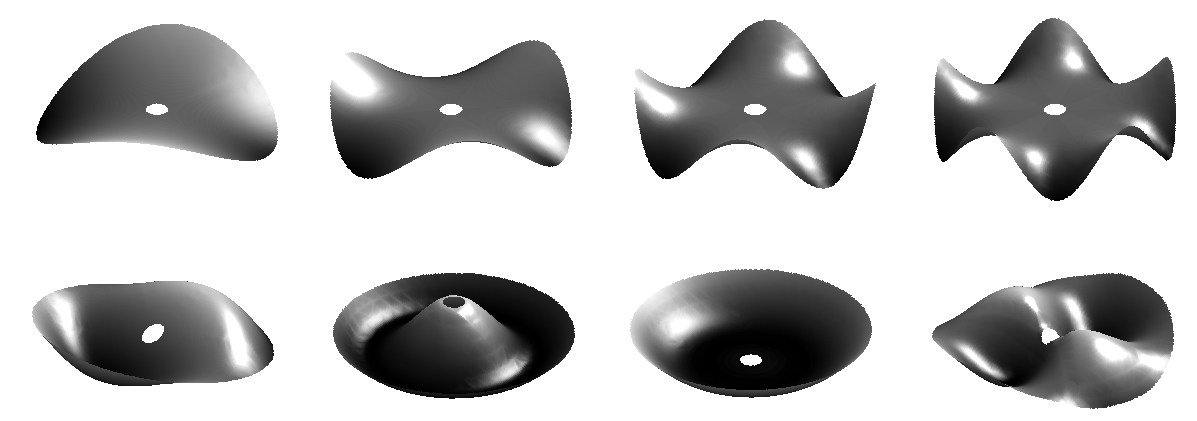
Bedingt durch die Fortschritte in der Fertigung optischer Komponenten werden auch an moderne optische Systeme sehr hohe Anforderungen an die Abbildungsgüte und die Minimierung von Abbildungsfehlern gestellt. Um diese zu erreichen, müssen aber neben den Optiken auch deren Halterungen und Verbindungen konstruktiv hochwertig sein. Trotzdem kommt es in komplexen optischen Systemen zu Abbildungsfehlern, die vielfältige Ursachen haben können. Dazu zählen vor allem Störgrößen, die von außen auf die Systeme wirken, und die selbst nicht oder nur gering beeinflussbar sind. Mittels entsprechender Messtechnik sowie aktiver und adaptiver Optiken können diese Störungen jedoch gemessen und ausgeglichen werden. Die Grundlagen für diese Funktionen bildet die Systemdynamik und die Regelungstechnik. Dazu werden am ISYS diese optomechatronischen Systeme modelliert und geeignete Regleralgorithmen entworfen. Die Störgrößen werden aus vorhandenen Messsignalen geschätzt und der aktuierten Optik zur Kompensation zugeführt. Somit trägt das ISYS dazu bei, die Potenziale heutiger Optiken in integrierten optischen Systemen besser auszunutzen und die Gesamtperformance dieser Systeme zu verbessern.



Wir suchen ständig motivierte Studierende, die sich im Rahmen einer Studien-, Diplom-, Bachelor- oder Masterarbeit an einem unserer Projekte beteiligen wollen. Die Aufgaben-stellungen liegen dabei typischerweise in den folgenden Bereichen:
Interessierte Studierende wenden sich bitte direkt an die Mitglieder der Optomechatronik-Gruppe um sich persönlich über mögliche Themen zu informieren.




