Projektziele "Dynamische Präzisionsregelung von Koordinatenmess- und Bearbeitungsmaschinen"
Sensorfusion von Linearencoder- und optischen Messsignalen zur Schätzung der Relativposition TCP-Werkstück unter Berücksichtigung der unterschiedlichen Sensoreigenschaften:
- Unterschiedliche Abtastzeiten und Quantisierungen
- Totzeiten
- Ausfall von Messsignalen
- Messrauschen
Implementierung von hochdynamischen redundanten Piezoaktoren mit geringem Hub zur Elimination der schnellen Fehlerdynamiken, welche nicht durch die langsameren Hauptachsen kompensiert werden können. Eine modellbasierte Bahnaufteilung zwischen Antriebsachsen und redundanten Dynamikachsen führt zur Erhöhung der Gesamtdynamik.
Implementierung und Evaluation verschiedener 2-FHG Reglerstrukturen zur Kompensation von dynamischen Fehlern und Steigerung der dynamischen Positioniergenauigkeit.
Beschreibung
Nanotechnologien finden ihren Weg in den Alltag in Form von funktionalen Oberflächen und Mikrosystemen. Die Miniaturisierung in modernen Technologien erfordert hochpräzise Mess- und Positionierkonzepte sowie Maschinen, um Objekte im Nanometerbereich zu analysieren und zu manipulieren. Neben angepassten Messgeräten, Konstruktion und Fertigung von Mechanik und Messstrategien sind auch Konzepte für den Entwurf und die Implementierung von Steuerungssystemen erforderlich. Ein wesentliches Ziel ist die Konditionierung von Bahnplanungs- und Steuerungssystemen hinsichtlich der Messstrategie, der Sensoren, Aktoren und des zu messenden Werkstücks. Die Systemintegration von multiskaligen Sensoren, Aktoren und Datenverarbeitung eröffnet neue Potenziale zur Erhöhung der Robustheit und Verkürzung der Messzeit. Bisherige Projekte zielten auf die systematische Integration aller Komponenten und führten zur Konzeption und Konstruktion eines Automated Multiscale Measurement Systems (AMMS). Ein Schwerpunkt war die Modellierung, Identifikation und Nutzung der nanometergroßen elastischen Reibungsdynamik für das Systemdesign und die hochpräzise Positionierung.
Im Rahmen des aktuellen DFG Projekts SA847/16-2 "Dynamische Referenzierung von Koordinatenmess- und Bearbeitungsmaschinen" werden Methoden zur Erhöhung der Dynamik der hochpräzisen Manipulation der Regelgröße Abstand Tool-Center-Point zu Werkstück untersucht. Um diese Zielgröße zu erfassen, wird vom Institut für Technische Optik (ITO) ein neuartiger holografischer Mehrpunktsensor entwickelt. Damit können dynamische Abweichungen auf Grund von erhöhten Beschleunigungskräften direkt gemessen werden. Dies ermöglicht weiterhin die Auslegung einer hochpräzisen Regelung zur Kompensation der dynamischen Abweichungen. Die somit realisierbaren höheren Geschwindigkeiten führen letztendlich zu einer höheren Durchsatzrate und somit einer gesteigerten Produktivität bei gleichbleibender Präzision.

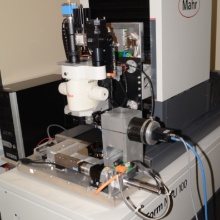
Zur experimentellen Validierung von Modellen und Konzepten dient eine modifizierte MarForm MFU-100 Koordinatenmessmaschine als Prüfstand. Um die Steuerungen durch eine dSPACE 1005 zu ersetzen, wurden die elektrischen Schnittstellen zur Maschine angepasst. Auch Teile der Mechanik wurden ausgetauscht, um den Anforderungen aktueller Projekte gerecht zu werden.
Projektpartner
Der größte Teil unserer Forschung wird im Rahmen von Industriekooperationen oder in Zusammenarbeit mit anderen Instituten durchgeführt.
Aktueller Projektpartner: Institut für Technische Optik (ITO)
Publikationen
- , “Multisensorisches Messsystem zur dreidimensionalen Inspektion technischer Oberflächen”, tm - Technisches Messen, 81, pp. 280-288, 2014, doi:10.1515/teme-2014-0402
- , “A Control System for Automated Multiscale Measuring systems”, Mechatronics, 22, pp. 338-348, 2012, doi:10.1016/j.mechatronics.2011.11.003
- , “Verlässlichkeitsanalayse von Indikatorfunktionen in einem Automatisierten Multiskalen Meßsystem”, tm - Technisches Messen, 77, pp. 493-499, 2010, doi:10.1524/teme.2010.0033
- , “Active Compensation of Dynamic Errors in a Coordinate-Measuring Machine”, 7th IFAC Symposium on Mechatronic Systems & 15th Mechatronics Forum International Conference, Loughborough, UK, 2016
- , “Automation and control of a multi-sensor measuring system for quality inspection of technical surfaces”, International Conference on Control, Automation, Robotics & Vision (ICARCV), Singapore, 2014, doi:10.1109/ICARCV.2014.7064319
- , “Friction parameter identification and compensation using the elastoplastic friction model”, Annual Meeting of the American Society for Precision Engineering, Boston, MA, USA, 2014
- , “Automated Multi-Scale Measurement System for MEMS-Characterization”, SPIE Conference on Optical Micro- and Nanometrology, 2010, doi:10.1117/12.853819
- , “Model-Based Control of a High-Precision Measurement Machine for Multiscale Inspection Tasks: in Preprints of the 5th IFAC Symposium on Mechatronic Systems”, IFAC Symposium on Mechatronic Systems, Cambridge, MA, USA, 2010
- , “Relibility Analysis of Indicator Functions in an Automated Multiscale Measuring System”, Opto, Nürnberg, Germany, 2009
- , “Modeling for Simulation and Control of a X-Y High Precision Positioning Table”, IEEE Conference on Automation Science and Engineering, Scottsdale, USA, 2007, pp. 1093-1097, doi:10.1109/COASE.2007.4341750
- , “Modelling and Control of a X-Y-Fine Positioning Table”, Ilmenauer Wissenschafliches Kolloquium (IWK), 2007
- , “Friction Modelling for Control of a Linear High Prescision Actuator”, IFAC Symposium on Mechatronic Systems, Heidelberg, Germany, 2006, pp. 461-466, doi:10.3182/20060912-3-DE-2911.00081
- , “Friction modelling of a linear high-precision actuator”, IFAC World Congress , Prague, Czech Republic, 2005, pp. 3309-3314, doi:10.3182/20050703-6-CZ-1902.01201
Förderung
Die Projekte in diesem Bereich wurden durch die Deutsche Forschungsgemeinschaft (DFG, aktuelles Projekt), sowie durch die Baden-Württemberg-Stiftung gefördert.