Goals of the project "Dynamic precision control of coordinate measuring and machine tools"
Sensor fusion of linear encoder and optical measurement signals for estimating the relative position TCP-workpiece, taking into account the different sensor properties:
- Different sampling times and quantizations
- Time delays
- Failure of measurement signals
- Measuring noise
Implementation of highly dynamic redundant piezo actuators with low stroke to eliminate the fast error dynamics, which cannot be compensated by the slower main axes. A model-based trajectory distribution between the drive and redundant dynamic axes leads to an increase in overall dynamics.
Implementation and evaluation of various 2-DOF controller structures to compensate for dynamic errors and increase dynamic positioning accuracy.
Description
Nanotechnologies find their way into everyday life in form of functional surfaces and microsystems. Miniaturization in advanced technologies demands for high-precision measuring and positioning concepts as well as machines, in order to analyze and manipulate objects on nanometer scale. Beside adjusted measurement equipment, construction and manufacturing of mechanics and measurement strategies, also concepts for the design and implementation of control systems are required. A fundamental aim is the conditioning of trajectory generation and control systems with respect to the measurement strategy, sensors, actuators and the sample to be measured. As a result the systems integration of sensors, actors and data handling in multiple scales results in/leads to new potentials to increase robustness and decrease measurement time. Previous projects have aimed at the systematic integration of all components resulting in the concept and design of an Automated Multiscale Measurement System (AMMS). One focus was the modelling, identification and utilization of nanometerscale pre-sliding friction dynamics for system design and high-precision positioning.
Within the scope of the current DFG project SA847/16-2 ‘Dynamische Referenzierung von Koordinatenmess- und Bearbeitungsmaschinen’ in collaboration with the Institute of Applied Optics (ITO) the goal is to increase the dynamics of high precision positioning of the tool-center-point (TCP) relative to a specimen. For this, a novel holographic multipoint optical sensor is designed by ITO, which allows to measure errors in the relative position TCP-specimen due to acceleration forces directly. Hence, a control system for the compensation of dynamic errors can be designed.

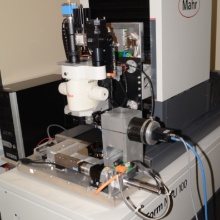
For experimental validation of models and concepts, a modified MarForm MFU-100 coordinate measuring machine serves as testbed. In order to replace the controllers with a dSPACE 1005 system the electrical interfaces to the machine were adapted. Also parts of the mechanics were exchanged to meet the requirements of current projects.
Partners
Most of our research is done as part of industry cooperation projects or in collaboration with other academic institutions.
Current partner: Institute of Applied Optics (ITO)
Publications
- , “Multisensorisches Messsystem zur dreidimensionalen Inspektion technischer Oberflächen”, tm - Technisches Messen, 81, pp. 280-288, 2014, doi:10.1515/teme-2014-0402
- , “A Control System for Automated Multiscale Measuring systems”, Mechatronics, 22, pp. 338-348, 2012, doi:10.1016/j.mechatronics.2011.11.003
- , “Verlässlichkeitsanalayse von Indikatorfunktionen in einem Automatisierten Multiskalen Meßsystem”, tm - Technisches Messen, 77, pp. 493-499, 2010, doi:10.1524/teme.2010.0033
- , “Active Compensation of Dynamic Errors in a Coordinate-Measuring Machine”, 7th IFAC Symposium on Mechatronic Systems & 15th Mechatronics Forum International Conference, Loughborough, UK, 2016
- , “Automation and control of a multi-sensor measuring system for quality inspection of technical surfaces”, International Conference on Control, Automation, Robotics & Vision (ICARCV), Singapore, 2014, doi:10.1109/ICARCV.2014.7064319
- , “Friction parameter identification and compensation using the elastoplastic friction model”, Annual Meeting of the American Society for Precision Engineering, Boston, MA, USA, 2014
- , “Automated Multi-Scale Measurement System for MEMS-Characterization”, SPIE Conference on Optical Micro- and Nanometrology, 2010, doi:10.1117/12.853819
- , “Model-Based Control of a High-Precision Measurement Machine for Multiscale Inspection Tasks: in Preprints of the 5th IFAC Symposium on Mechatronic Systems”, IFAC Symposium on Mechatronic Systems, Cambridge, MA, USA, 2010
- , “Relibility Analysis of Indicator Functions in an Automated Multiscale Measuring System”, Opto, Nürnberg, Germany, 2009
- , “Modeling for Simulation and Control of a X-Y High Precision Positioning Table”, IEEE Conference on Automation Science and Engineering, Scottsdale, USA, 2007, pp. 1093-1097, doi:10.1109/COASE.2007.4341750
- , “Modelling and Control of a X-Y-Fine Positioning Table”, Ilmenauer Wissenschafliches Kolloquium (IWK), 2007
- , “Friction Modelling for Control of a Linear High Prescision Actuator”, IFAC Symposium on Mechatronic Systems, Heidelberg, Germany, 2006, pp. 461-466, doi:10.3182/20060912-3-DE-2911.00081
- , “Friction modelling of a linear high-precision actuator”, IFAC World Congress , Prague, Czech Republic, 2005, pp. 3309-3314, doi:10.3182/20050703-6-CZ-1902.01201
Funding
The projects in this area were funded by the German Research Foundation (DFG, current project) and the Baden-Württemberg Foundation.