Beschreibung
Kontinuierliche Manipulatoren sind Roboter, die ihre Werkzeugbewegung durch eine kontinuierliche Deformation der Manipulatorstruktur erhalten. Ihre Bedeutsamkeit ist vor allem in den letzten Jahren stetig gestiegen, da sie mit ihren kontinuierlichen Verformungen in ihrer inhärenten Flexibilität neue Anwendungsfelder erschließen, wo z.B. klassische Roboter mit diskreten Gelenken nicht vorteilhaft sind. Diese sind beispielsweise die minimalinvasive Chirurgie, bei der ein großer Arbeitsbereich durch eine kleine Öffnung erreicht werden soll und die Mensch-Maschine Kooperation für die sich weiche, inhärent sichere Manipulatoren eignen. Durch ihre biologischen Vorbilder inspiriert, sind viele Kontinuum-Manipulatoren Schlangen, Elefantenrüsseln und Oktopusarmen nachempfunden. Um die gewünschte Manipulatorbewegung zu erreichen, werden ein oder mehrere hintereinandergeschaltete, individuell steuerbare Sektionen deformiert.
Bionic Soft Arm
Bild: (c) Festo AG & Co. KG

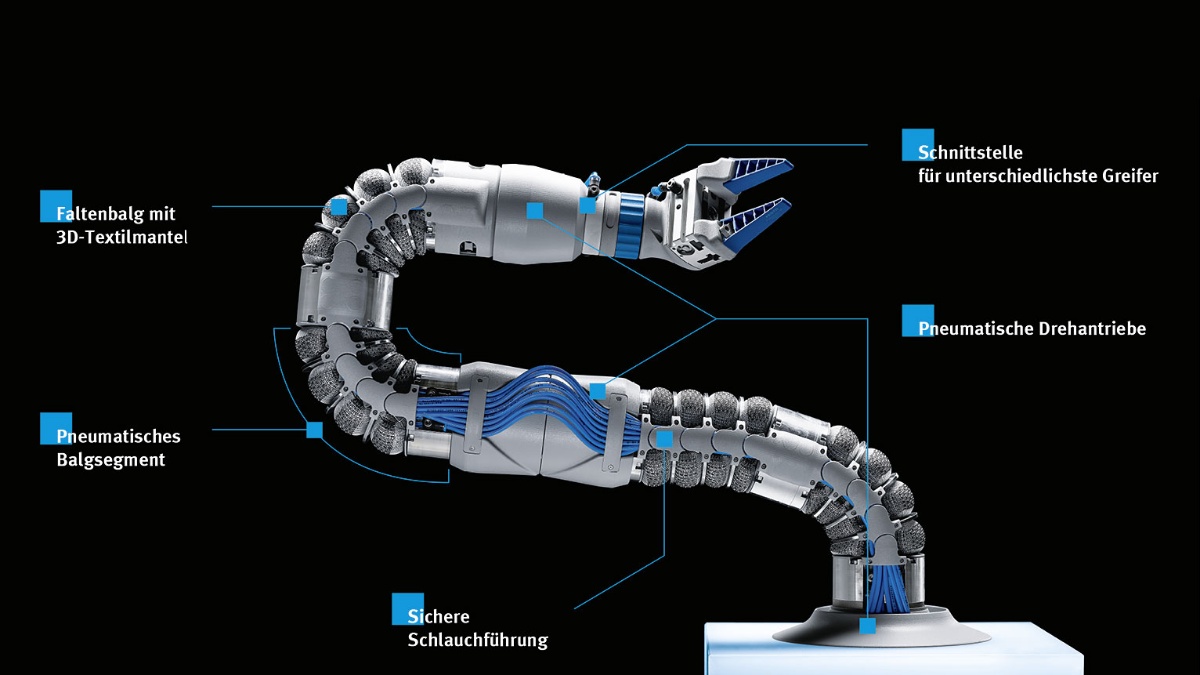
Bionischer Handling-Assistent
Bild: (c) Festo AG & Co. KG
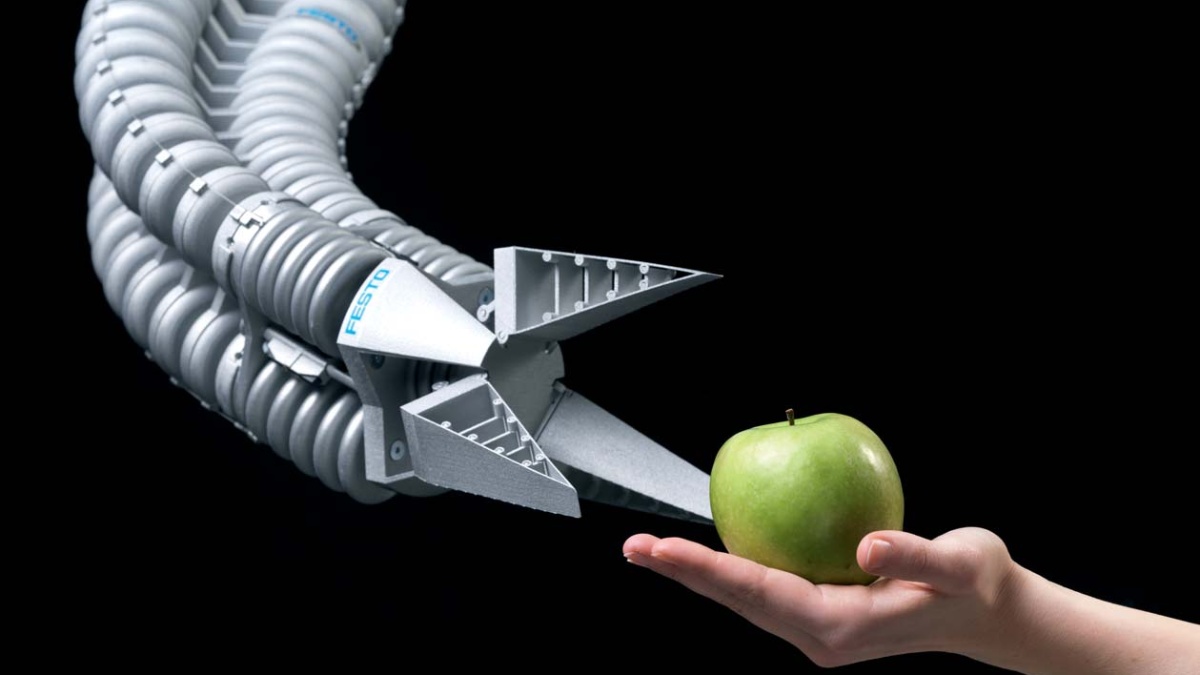
Bionischer Handling-Assistent
Bild: (c) Festo AG & Co. KG
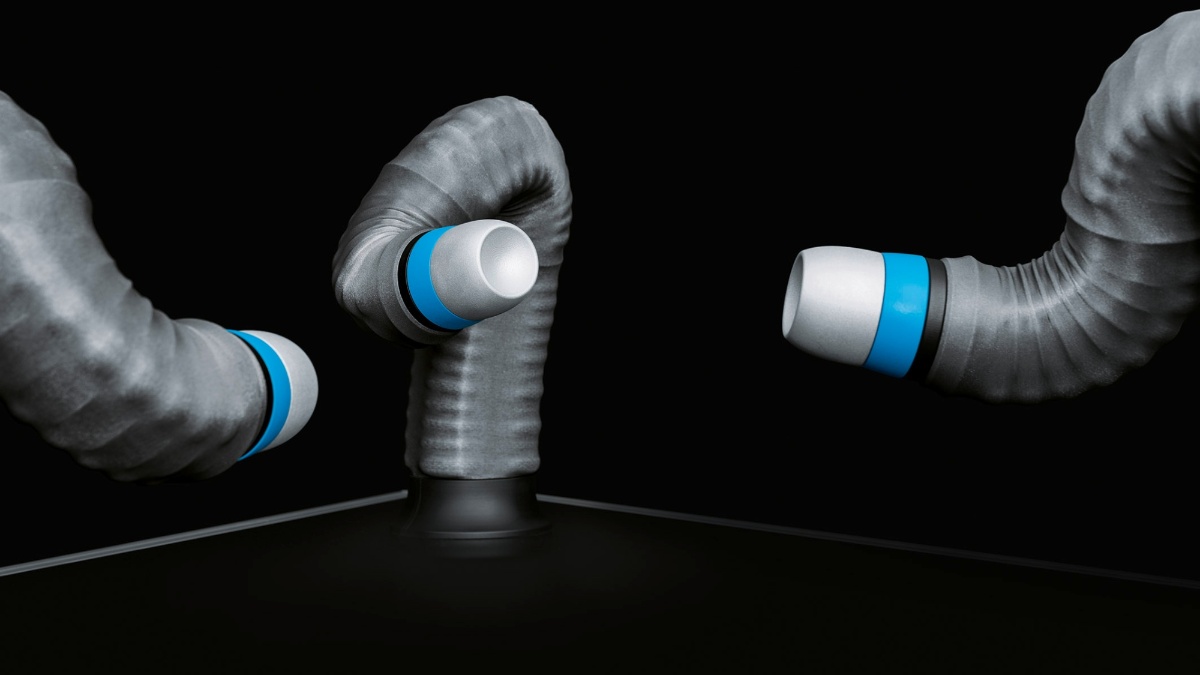
Bionic Motion Robot
Bild: (c) Festo AG & Co. KG

Bionic Motion Robot
Bild: (c) Festo AG & Co. KG
Im Gegensatz zu der Entwicklung klassischer industrieller Roboter, die über eine lange Zeit hin vorangetrieben wurde und für die mittlerweile ausgereifte Methoden für Modellierung, Regelung und Trajektorienplanung existieren, steht die Übertragung und Entwicklung ähnlicher Methoden für Kontinuum-Manipulatoren noch am Anfang.
Ziel des Projekts ist die Methodenentwicklung von modellbasierten Steuerungs- und Regelungsalgorithmen für redundante Kontinuumroboter zur Objektmanipulation. Die entwickelten Methoden sollen am Beispiel von pneumatisch aktuierten Kontinuum-Manipulatoren untersucht werden, die insbesondere für spätere Erweiterungen in Richtung modellbasierter Algorithmen im Umfeld der Mensch-Maschine-Interaktion ein hohes Potential besitzen.
Das Forschungsprojekt umfasst folgende Unterthemen:
- Trajektorienplanung für kontinuierliche Roboter
- Entwicklung und Vergleich von Reglerentwurfsverfahren für kontinuirliche Roboter mit physikalisch gekoppelte Aktuatoren in Aktuator- und Werkzeugkoordinaten
- Erweiterung der Trajektorienplanung-und Regelungskonzepte für den Kontaktfall
Das Projekt basiert auf Vorarbeiten aus dem Projekt Kontinuum-Manipulatoren.
Förderung
Dieses Projekt wird durch die Deutsche Forschungsgemeinschaft (DFG) gefördert.
Publikationen
Beiträge in Zeitschriften
- , “Energy Efficient Pneumatics: Aspects of Control and Systems Theory”, International Journal of Fluid Power, 2022
- , “One-Shot kinesthetic programming by demonstration for soft collaborative robots”, Mechatronics, 2020
- , “Hybrid force/position control for quasi continuum manipulators”, at - Automatisierungstechnik, 2020
Konferenzbeiträge
- , “Data-Driven Predictive Disturbance Observer for Quasi Continuum Manipulators”, 61st IEEE Conference on Decision and Control, Cancún, Mexico, 2022
- , “Modelling the Bellows of the Bionic Soft Arm”, 10th Vienna International Conference on Mathematical Modelling (MathMod 2022), Vienna, Austria, 2022
- , “Nonlinear Model Predictive Control of Quasi Continuum Manipulators”, Conference on Control Technology and Applications (CCTA), 2021
- , “Nonlinear Model based Dynamic Control of Pneumatic driven Quasi Continuum Manipulators”, International Symposium on System Integration (SII), Honolulu Hawaii, USA, 2020
- , “Disturbance Observer Based Control for Quasi Continuum Manipulators”, 21st IFAC World Congress, Berlin, Germany, 2020
- , “Model Predictive Force Control for Robots in compliant Environments with guaranteed Maximum Force”, American Control Conference (ACC), Philadelphia, USA, 2019
Kontakt

Samuel Pilch
M.Sc.Wissenschaftlicher Mitarbeiter