
Description
Continuum manipulators can continuously bend and extend using a continuous deformation of their structure. Inspired by snakes, trunks, octopus tentacles, or eels, they have gathered increasing attention in the past decade of robotics research as they enable new fields of application by their inherent flexibility and continuous deformations. This leads to an advantage where commonly used rigid-link robots with joints are not beneficial, e.g., in human-machine interaction and minimal invasive surgery. The former benefits from the soft, inherently safe structure and the later from the continuum manipulator’s ability to access confined areas through small openings.

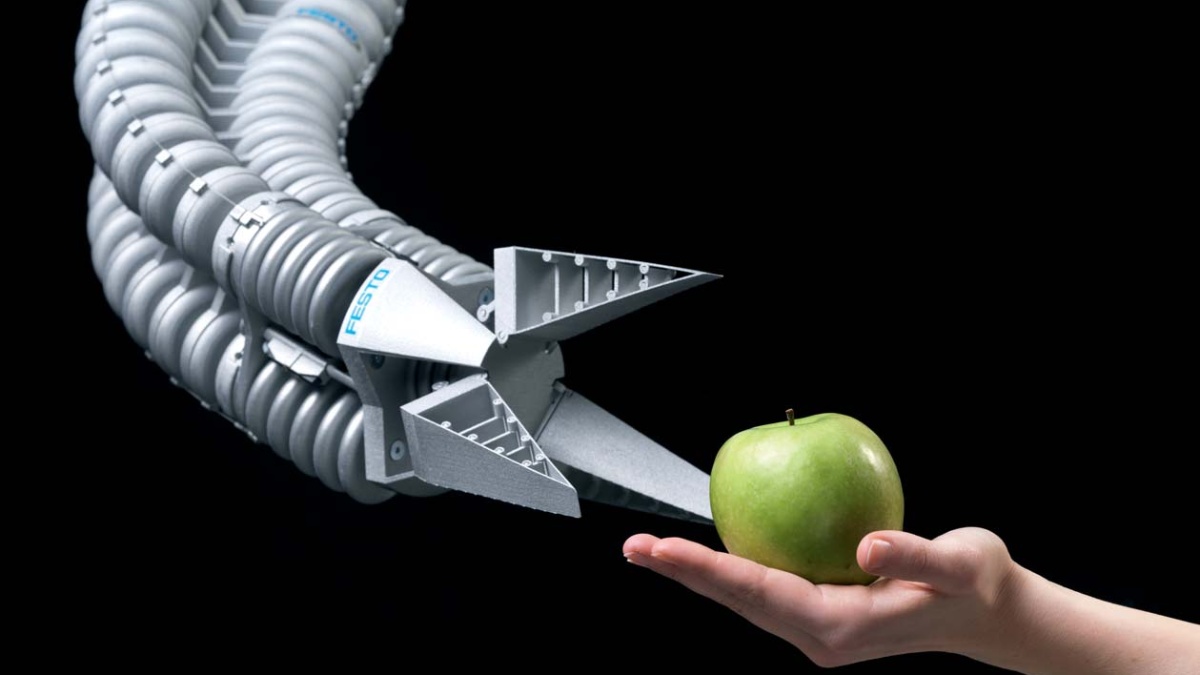
Bionic Handling Assistant
Image: (c) Festo AG & Co. KG
Bionic Handling Assistant
Image: (c) Festo AG & Co. KG
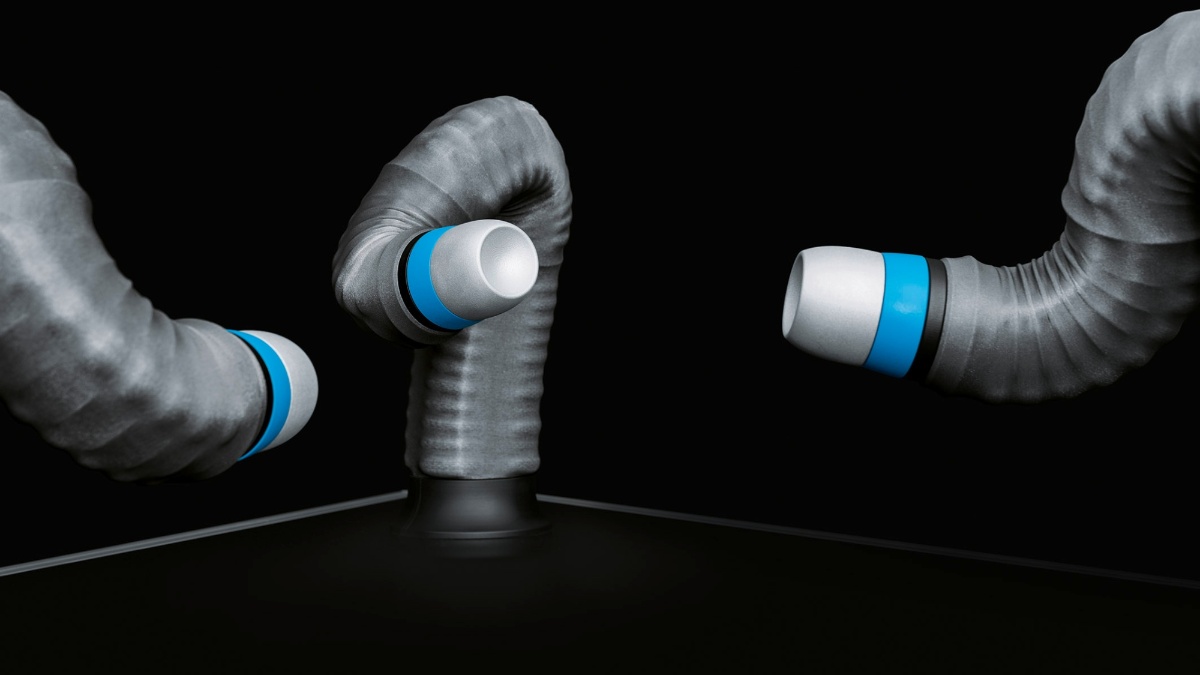
Bionic Motion Robot
Image: (c) Festo AG & Co. KG

Bionic Motion Robot
Image: (c) Festo AG & Co. KG
In contrast to conventional robots, for which fully-developed methods for model-based trajectory planning and control exist, for continuum manipulators the transfer of those methods and the development of new ones is still at an early stage.
The goal of this project is to develop model-based trajectory and control algorithm for object handling with redundant continuum manipulators. The methods are demonstrated using a Bionic Handling Assistant or a Bionic Motion Robot.
The research project contains the following subtopics:
- Trajectory planning for continuum manipulators
- Development and comparison of control design methods for continuum manipulators with coupled actuator dynamics
- Extension of the trajectory planning and control design concepts to the case of contact
The project continuous previous work within the project Continuum Manipulators.
Funding
This project is funded by the German Research Foundation (DFG).
Contact

Samuel Pilch
M.Sc.Wissenschaftlicher Mitarbeiter