Beschreibung
Die durchgängige digitale Planung, Auslegung und virtuelle Inbetriebnahme von Automatisierungslösungen mittels digitaler Zwillinge werden für die Wettbewerbsfähigkeit der kleinen und mittleren Unternehmen (KMU) in Deutschland immer wichtiger. Bisher scheitert die virtuelle Inbetriebnahme jedoch an der Simulation von nachgiebigen Objekten, besonders in Kombination mit der hohen Variabilität von Gebinden. Bisher ist es nicht möglich, die labilen und biegeschlaffen Gebinde und die damit verbundenen Reibprozesse und Kontaktsituationen im Rahmen einer Echtzeitsimulation zu simulieren. Dies führt dazu, dass die Inbetriebnahme vor Ort mit umfangreichen Feldversuchen, abhängig von der Form unterschiedlicher Gebinde, mit mehreren hundert Versuchen stattfindet. Darüber hinaus wird auch die Vakuumtechnik überdimensioniert.
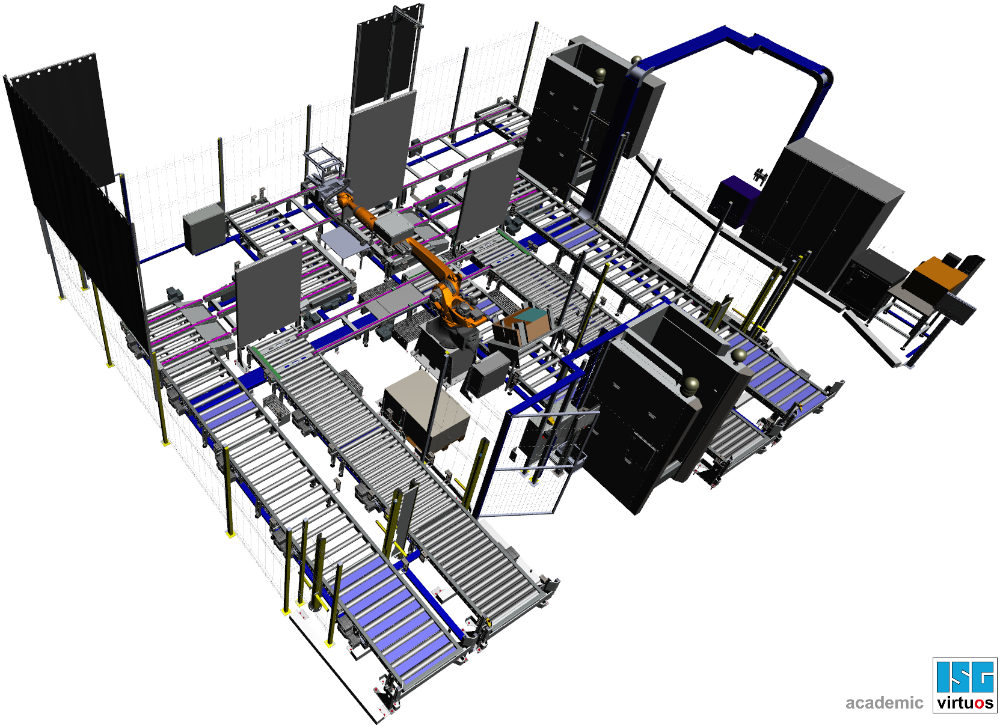
Ziel des Projektes ist die Entwicklung neuartiger Simulationsmethoden und -modelle, welche die wesentlichen statischen und dynamischen Phänomene einer Handhabung von nachgiebigen Objekten abbilden. Als Ergebnis des Projektes stehen neuartige Simulationsmethoden zur Verfügung, welche die einfache Modellierung von nachgiebigen Objekten im Rahmen eines digitalen Zwillings ermöglichen. Die Bestimmung der benötigten Parameter geschieht dabei entweder durch datenbasierte Verfahren und dem Vergleich mit ähnlichen und bereits integrierten Greiferlösungen oder in iterativen und standardisierten Simulations- und Versuchsläufen, wobei das dominante Systemverhalten über Verfahren der Systemidentifikation bestimmt wird.
Projektpartner
Die ISG Industrielle Steuerungstechnik GmbH bietet innovative Softwarelösungen und Technologien sowie qualifizierte und verlässliche Dienstleistungen. Das Produktspektrum umfasst Simulationsplattformen zur virtuellen Inbetriebnahme, Testautomatisierungstools sowie Steuerungstechnik.
PREMIUM ROBOTICS entwickelt und realisiert Greiflösungen für die Robotik in der Logistik. Dabei bietet Premium Robotics nicht allein den Greifer, sondern Roboteranlagen als logistische Komplettsysteme zur Kommissionierung, Palettierung und Depalettierung von großen Sortimenten mit komplexen Gebinden, welche sich mit herkömmlichen Greifsystemen nicht bewältigen lassen. Das Ziel von Premium Robotics ist es, schwere und belastende Tätigkeiten in der Logistik zu automatisieren oder zu vereinfachen.
Förderung
Das Projekt wird vom Bundesministerium für Bildung und Forschung (BMBF) im Rahmen der Förderinitiative KMU-innovativ finanziell unterstützt.
https://www.bmbf.de/bmbf/de/forschung/innovativer-mittelstand/kmu-innovativ/kmu-innovativ_node.html
Bearbeiter

Christos Parlapanis
M.Sc.Wissenschaftlicher Mitarbeiter

Marc Wehmeier
M.Sc.Wissenschaftlicher Mitarbeiter

Sören Hain
M. Sc.Wissenschaftlicher Mitarbeiter