Description
For the installation and maintenance of these underwater production facilities, loads have to be transferred to the seabed and back to the still water level. In general, vessels with special cranes are used for such subsea lifting operations. However, every vessel on the ocean gets continuously disturbed by waves, wind and ocean currents and thus moves both horizontally and vertically. Especially the vertical motion has significant effects on subsea lifting operations, since the vertical load motion gets influenced. Thus, an accurate and safe positioning of the load is hardly possible during harsh sea conditions. Furthermore, the vertical vessel motion results in enormous dynamic loads that act on the overall crane structure and the rope with the attached load. To avoid these problems, subsea lifting operations normally require nice weather conditions and calm sea states. In order to increase the time windows for subsea lifting operations, compensation systems can be used. The objective of these systems is to decouple the vertical load motion from the vertical vessel motion. Since the crane operator has not to consider vertical vessel motion due to the compensation system, safe subsea lifting operations can also be performed during harsh sea conditions.
Within the project, the Institute for System Dynamics works in cooperation with the Liebherr-Werk Nenzing GmbH on the development and implementation of an active heave compensation (AHC) system for offshore cranes, called Heavetronic®. The applied approach utilizes the periodic form of wave motion and based on that predicts the vertical vessel motion. Thereby it is possible to compensate for time delays in the system and directly take actuator constraints into account during the trajectory generation. The subjects of the institute are:
- Estimation of the vertical motion that should be compensated using accelerometer and gyroscope measurements
- Prediction of the vertical motion
- Trajectory generation under consideration of actuator constraints
- Active control of the hoisting winch to compensate for vertical vessel motion

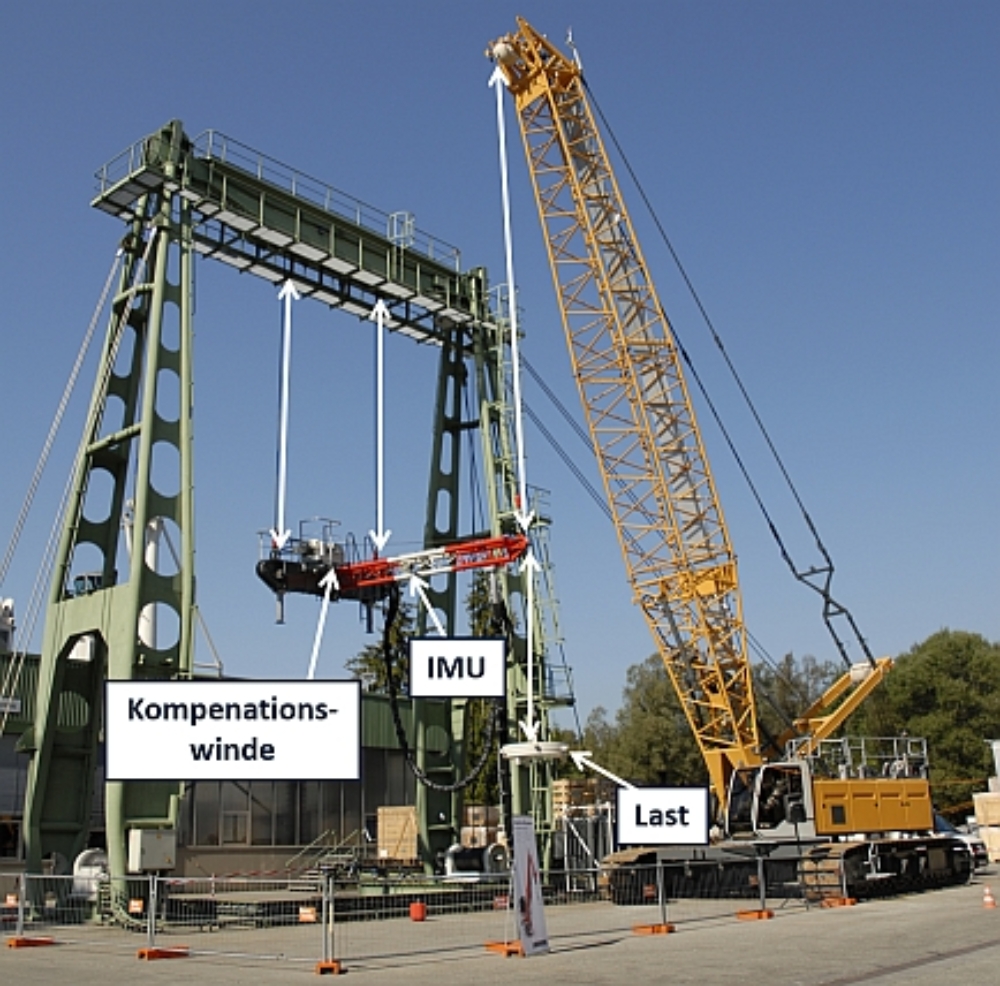
Using the Liebherr test bench which is designed in a tripod shape, the algorithms of the AHC can be evaluated and continuously improved. The actuation of three winches allows the imitation of the relevant vessel motions (roll, pitch and heave). The vertical tripod motion can be estimated using an inertial measurement unit (IMU) which is attached to the boom. In order to decouple the load motion from the tripod motion, the compensation winch is actuated by the developed AHC algorithms. Using reference measurements from several additional sensors from the test bench, the quality of the active heave compensation system can be evaluated.

The developed Heavetronic® system is integrated in the Liebherr control system and is used the first time in the offshore crane RL-K 7500. The main features of this crane are:
♦ Maximum outreach of 50m
♦ Main lifting capacity of up to 300t
♦ Deepsea lifting operations in depths of up to 3600m
♦ Knuckle boom for increasing flexibility
♦ Use of a hydraulic hybrid drive