Beschreibung
Obwohl der Anteil an erneuerbaren Energien stetig steigt, wird weiterhin der Hauptanteil der verbrauchten Energie aus klassischen fossilen Energieträgern wie Erdöl und Erdgas gewonnen. Um den aktuellen und zukünftigen Bedarf an diesen Energieträgern abzudecken, wird die Förderung von Öl und Gas auch in Zukunft ein zentrales Thema darstellen. Speziell die Offshore-Förderung wird dabei immer weiter in den Vordergrund rücken und zu neuen technologischen Herausforderungen führen. So ist schon aktuell ein stetiger Anstieg an Förderanlagen, welche komplett auf dem Meeresgrund aufgebaut werden, zu erkennen.
Für den Aufbau und die Wartung dieser Anlagen müssen Lasten auf den Meeresgrund abgelassen und vom Meeresgrund zurück an die Oberfläche gehoben werden. Dies wird im Allgemeinen von Schiffen aus mit speziellen Kranen bei sogenannten Tiefseehüben durchgeführt. Erschwerend kommt dabei hinzu, dass jedes Schiff auf dem offenen Meer Wellen, Wind und Strömungen ausgesetzt ist und sich dadurch sowohl in horizontaler als auch in vertikaler Richtung bewegt. Speziell die Vertikalbewegung des Schiffs hat einen großen Einfluss auf Tiefseehübe, da sich diese direkt auf die vertikale Lastbewegung auswirkt und somit bei stärkerem Seegang ein genaues Platzieren der Last unmöglich macht. Darüber hinaus sind bei starkem Seegang das Seil und auch die Kranstruktur hohen dynamischen Kräften ausgesetzt. Um diese Problematiken zu vermeiden, werden Tiefseehübe häufig nur bei schönem Wetter und ruhiger See durchgeführt. Um die Zeitfenster für solche Tiefseehübe zu erhöhen können allerdings Systeme zur Seegangskompensation eingesetzt werden. Das Ziel dieser Systeme ist eine Entkopplung der vertikalen Lastbewegung von der vertikalen Schiffsbewegung. Da der Kranfahrer aufgrund eines solchen Systems die vertikale Schiffsbewegung nicht mehr beachten muss, kann auch bei unruhiger See ohne erhöhtes Risiko gearbeitet werden.
Innerhalb dieses Projekts arbeitet das Institut für Systemdynamik in Kooperation mit der Liebherr-Werk Nenzing GmbH an der Entwicklung eines Systems zur aktiven Seegangskompensation (AHC), der sogenannten Heavetronic®. Bei dem verfolgten Ansatz wird die periodische Form des Seegangs ausgenutzt und auf der Basis dessen eine Prognose der Schiffsbewegung durchgeführt. Dadurch können Totzeiten im System überbrückt und Antriebsbeschränkungen im Voraus bei der Trajektorienplanung explizit berücksichtigt werden. Die Aufgaben am Institut sind bei diesem Projekt:
♦ Erfassung der zu kompensierenden Vertikalbewegung aus Beschleunigungs- und
Gyroskopsignalen
♦ Prognose der geschätzten Vertikalbewegung
♦ Trajektoriengenerierung unter Beachtung von Antriebsbeschränkungen
♦ Aktive Regelung der Hubwinde zur Kompensation der vertikalen Schiffsbewegung

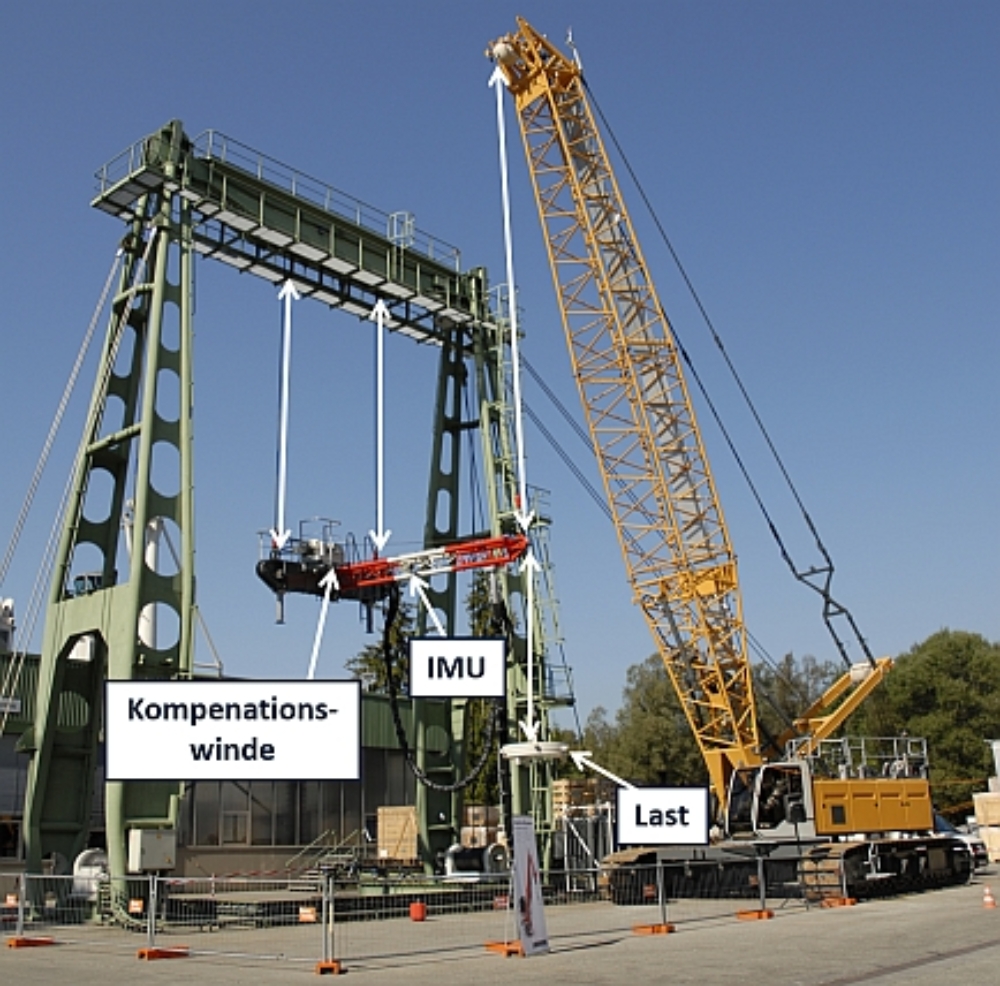
Am Prüfstand der Firma Liebherr können die Algorithmen der AHC praktisch evaluiert und kontinuierlich verbessert werden. Er ist in Form eines Tripods konstruiert und aufgebaut. Über drei angesteuerte Winden ist es möglich, die relevanten Schiffsbewegungen (Rollen, Nicken und Tauchen) zu imitieren. Die vertikale Tripod-Bewegung kann mithilfe einer inertialen Messeinheit (IMU), welche am rot-weißen Ausleger platziert ist, geschätzt werden. Die Kompensationswinde, welche mithilfe der entwickelten AHC-Algorithmen angesteuert wird, ermöglicht es, die Lastbewegung von der Tripod-Bewegung zu entkoppeln. Zur Evaluierung der aktiven Seegangskompensation, ist der Prüfstand mit mehreren Sensoren ausgestattet, welche Referenzmessungen liefern.

Die speziell für Tiefseehübe entwickelte Heavetronic® ist in das Liebherr-Steuerungssystem integriert und ist erstmals im RL-K 7500 im Einsatz. Die Hauptmerkmale dieses Krans sind:
♦ Maximale Ausladung von 50m
♦ Haupthubkapazität von bis zu 300t
♦ Tiefseeoperationen in Wassertiefen von bis zu 3600m
♦ Knickausleger für erhöhte Flexibilität
♦ Verwendung eines hydraulischen Hybridantriebs